vfx
Renderizar AOVs
Um passe de posição descreve a posição real da geometria representada por cada pixel. Ou seja, a origem, se representada pela geometria na imagem e visível, terá um valor RGB de (0,0,0).

rendering
Uma AOV, ou "variável de saída arbitrária", é um componente de renderização 3D usado para armazenar um atributo específico de uma imagem. Por exemplo, uma AOV pode ser usada para armazenar a cor difusa de um objeto, os reflexos em sua superfície ou as sombras projetadas por outros objetos. As AOVs permitem que os compositores ajustem a aparência de um objeto ou cena, modificando atributos específicos separadamente do restante da imagem.
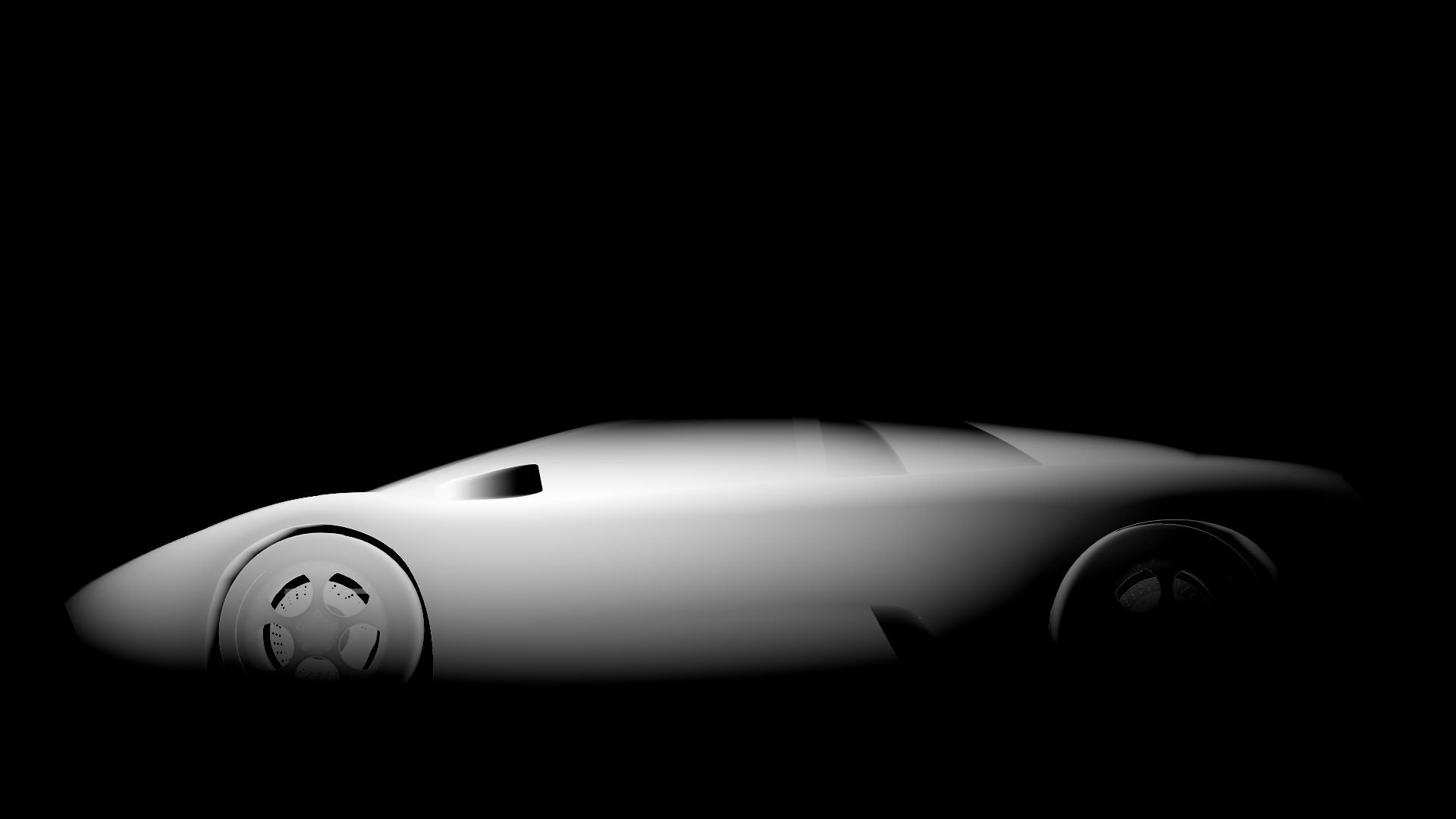
Difuso

A reflexão difusa e a reflexão especular são dois tipos de reflexão que ocorrem quando a luz incide sobre um objeto.
A reflexão difusa é a dispersão da luz em todas as direções a partir de uma superfície e é a principal fonte de luz em uma cena. Ela é responsável pelo brilho e pela cor geral de um objeto e é um aspecto fundamental de sua aparência. Em contraste, a reflexão especular é a reflexão concentrada da luz a partir de uma superfície em uma única direção e é a fonte de realces e reflexos na superfície de um objeto. É um aspecto fundamental da aparência de um objeto e pode ajudar a criar a ilusão de realismo e profundidade em uma cena.

Especular
A luz especular é o reflexo de uma fonte de luz.



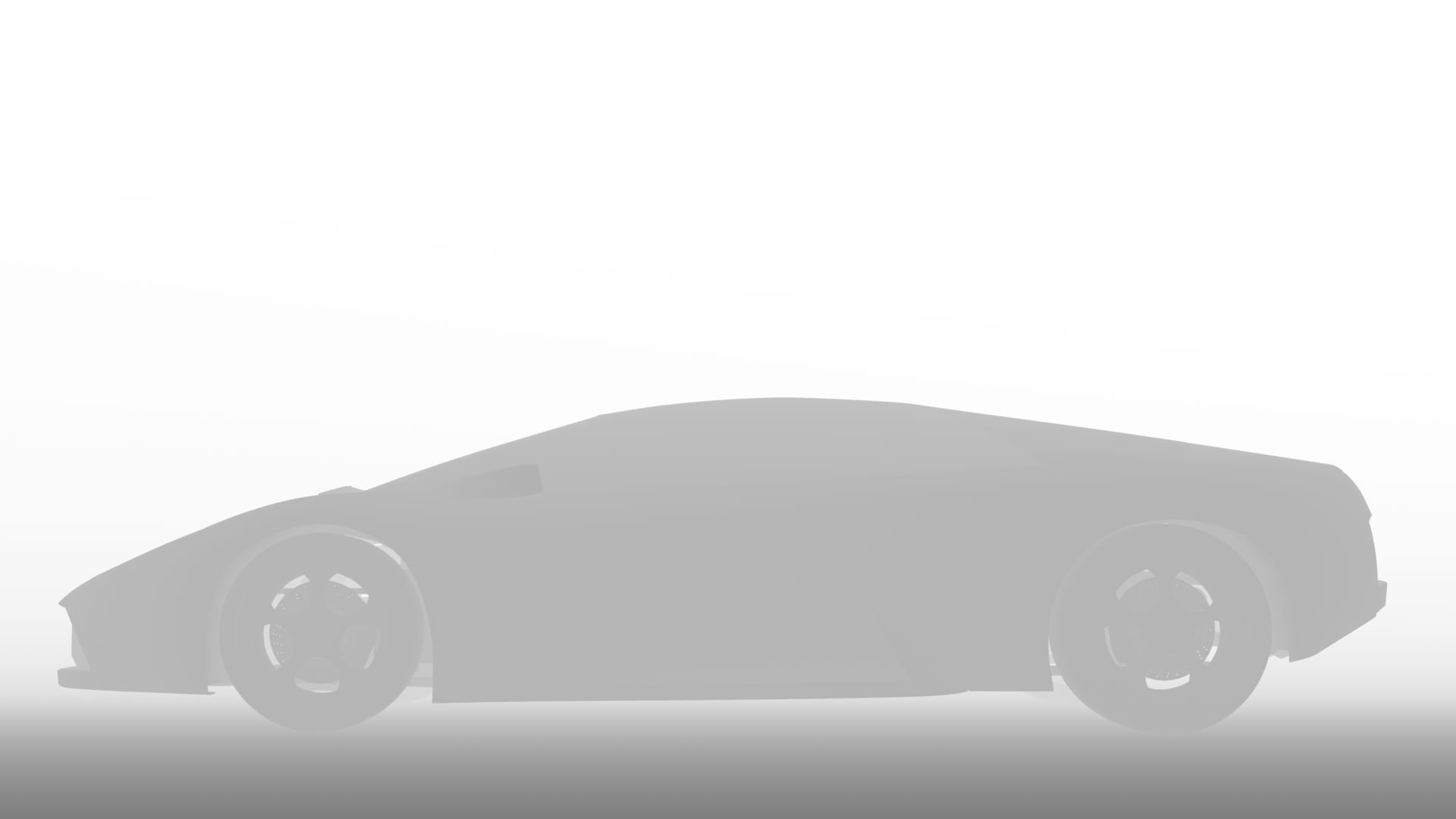
Albedo
O albedo é um componente de renderização usado para armazenar a cor difusa, ou não especular, de um objeto. É comumente usado para separar a cor difusa de um objeto de seus outros atributos, como reflexos e sombras. Isso permite que os compositores manipulem e ajustem a cor difusa de um objeto em uma composição com mais facilidade.
Pro Tip
Refração / Transmissão
Calcular refrações pode ser caro e desafiador para a direção artística. Portanto, em efeitos visuais, essa tarefa geralmente fica a cargo do compositor, que a simula com o software.iDistortnó.
Camadas de dados
Dados adicionais fornecidos pelo mecanismo de renderização que não contribuem para a "beleza", mas podem ser usados pelos compositores. As camadas de dados precisam ser usadas sem pré-multiplicação.
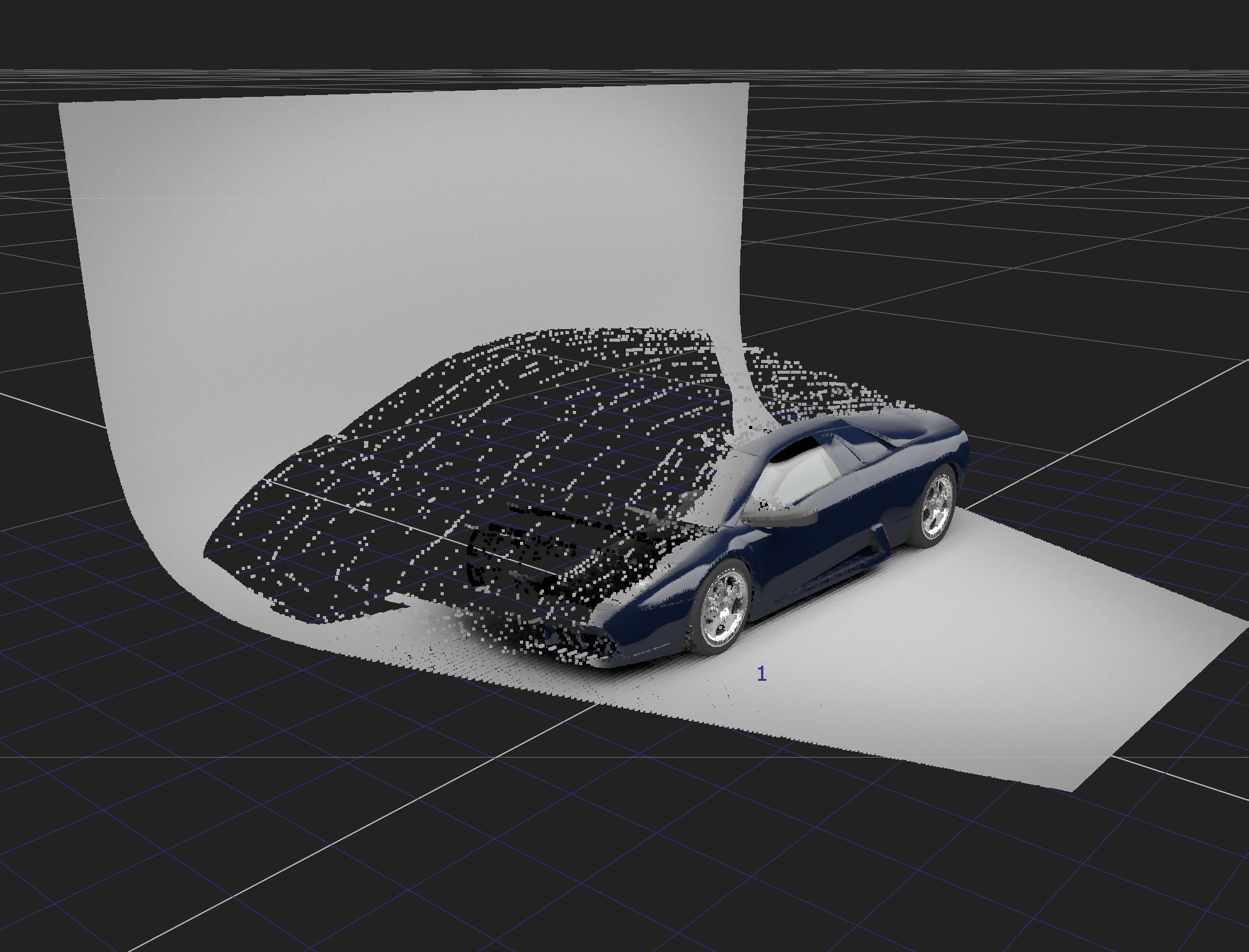
Profundidade
Um passe de profundidade é um componente de renderização usado para armazenar a distância de um objeto ou superfície em relação à câmera. É comumente usado em composição para criar a aparência de profundidade e distância em uma cena ou para controlar o nó zDefocus. Um passe de profundidade normalizado usa uma faixa de valores de 0 a 1 para representar a distância de um objeto em relação à câmera, com 0 representando os objetos mais próximos e 1 representando os objetos mais distantes. Isso permite que os compositores manipulem mais facilmente a profundidade e a distância dos objetos em uma composição.
Pro Tip
Normais
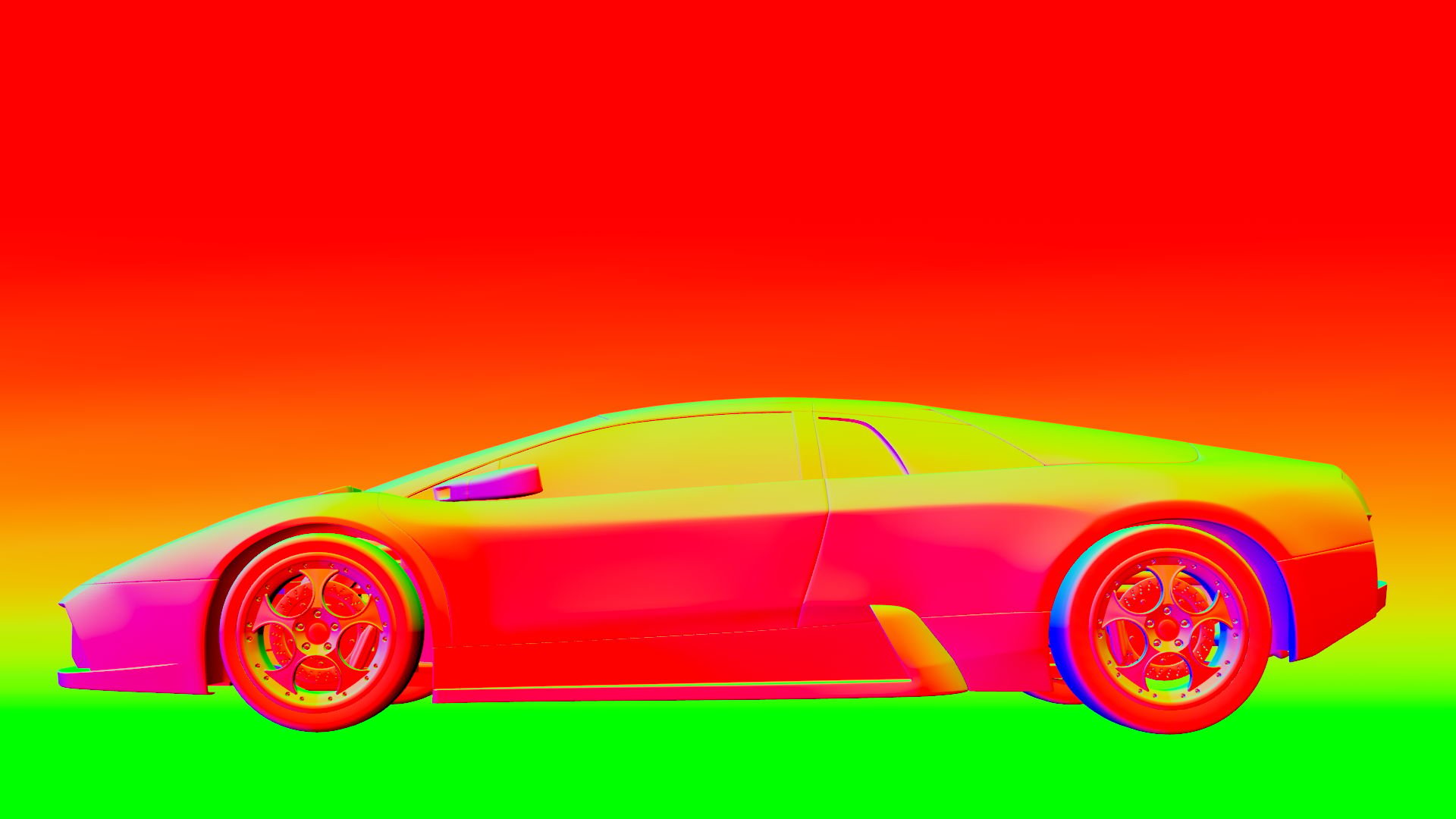
As normais representam o ângulo da face representado por cada pixel. Esse ângulo pode ser baseado na localização da câmera, ou seja, no "espaço da câmera", no espaço do mundo, onde o ângulo é baseado no sistema de coordenadas, e no espaço do objeto, onde as normais são definidas de acordo com o sistema de coordenadas do objeto, derivado de seus valores de rotação. Na maioria das vezes, você desejará renderizar as normais no espaço da câmera, o que tem o benefício adicional do canal azul equivaler a uma renderização com proporção de face.
Posição
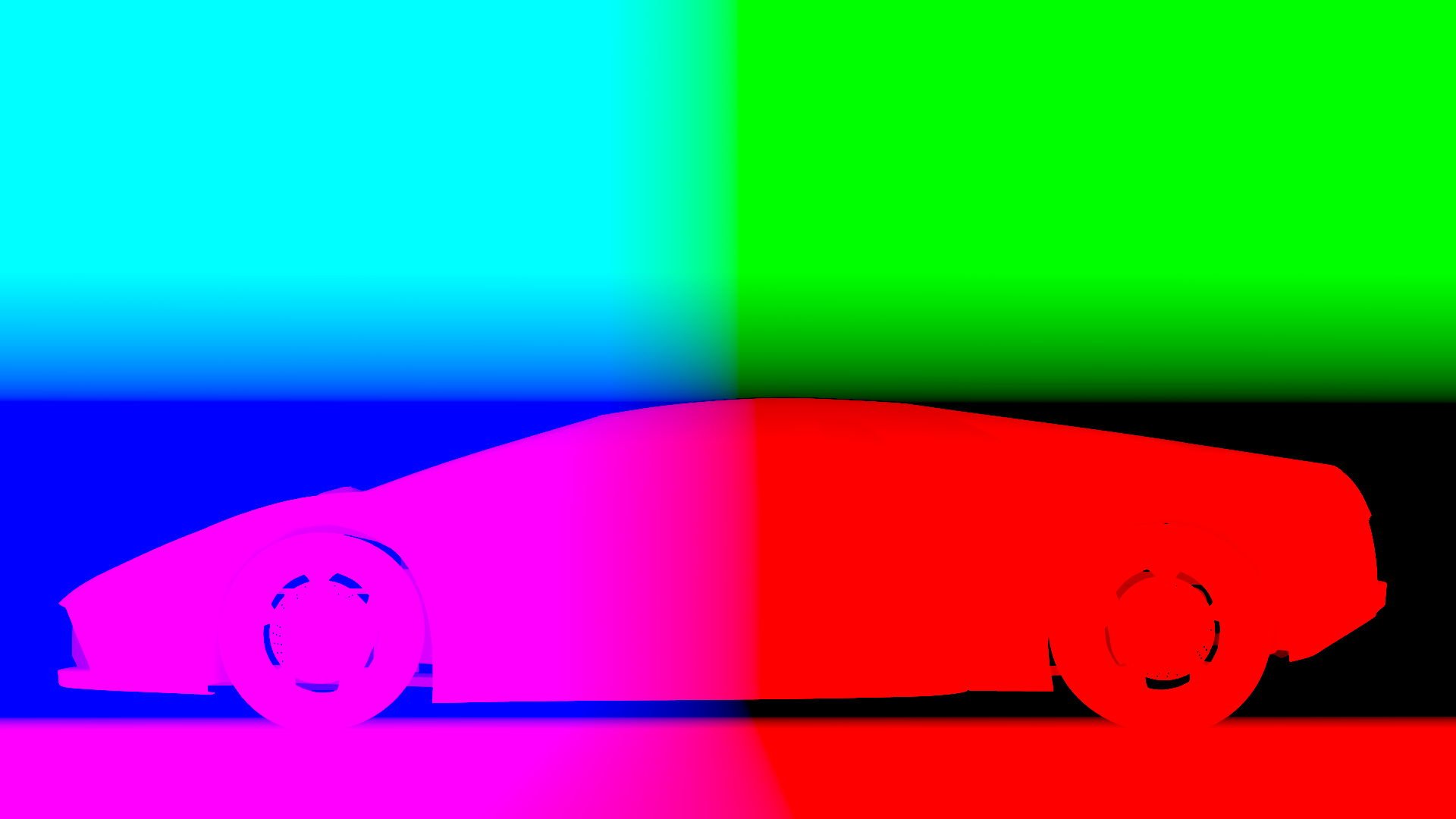
Um passe de posição descreve a posição real da geometria representada por cada pixel. Ou seja, a origem, se representada pela geometria na imagem e visível, terá um valor RGB de (0,0,0).
ID Mattes
Algumas plataformas de efeitos visuais renderizam uma seleção de máscaras de identificação (ID mattes) para o usuário escolher. Mais comumente, utiliza-se uma ferramenta chamadaCriptomateÉ utilizado para gerar automaticamente IDs selecionáveis com base em materiais e IDs de objetos. Isso é essencial no fluxo de trabalho moderno de efeitos visuais, pois o feedback geralmente se concentra em elementos ou materiais específicos dentro de uma renderização 3D.
Vetores de movimento
Os vetores de movimento são usados para representar o movimento da superfície de um objeto ao longo do tempo no espaço da tela e são comumente usados para aplicar desfoque de movimento em uma imagem durante a composição. Em um AOV de vetor de movimento, cada pixel em uma imagem é representado por um par de vetores que indicam a direção e a velocidade do movimento desse pixel.
